领克汽车的前身是什么?领克品牌背后的历史有哪些?
3
2025-07-14
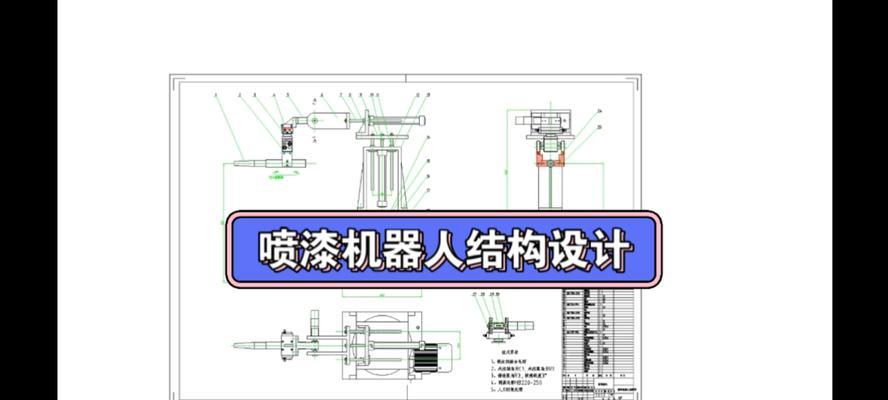
在现代工业、服务及家庭领域,机器人的应用越来越广泛。结构设计作为机器人研发的基石,决定了其性能、稳定性和外观。本文将深入探讨机器人结构设计的主要部分,以及在设计过程中可能遇到的一些常见问题。
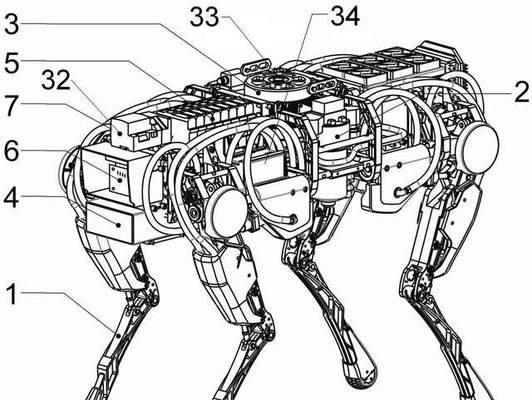
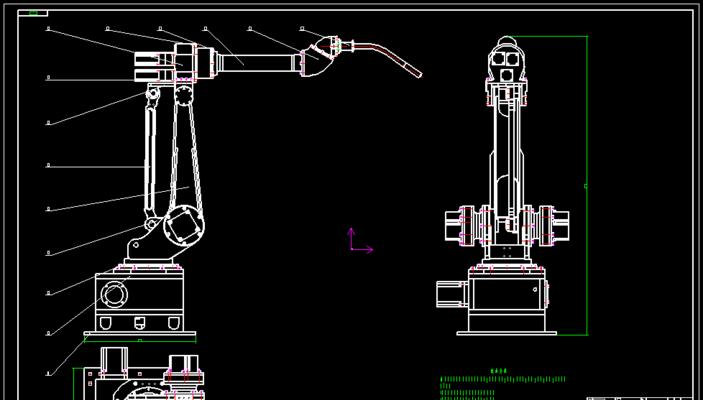
1.1机械本体设计
机械本体是机器人的物理基础,包括机器人的骨架、关节、连杆、底座等部分。在设计机械本体时需要考虑材料的强度、重量、耐腐蚀性等因素,确保机器人具备良好的稳定性和移动性。
1.2驱动系统设计
驱动系统由电动机、液压系统或气动系统组成,是实现机器人运动的“肌肉”。设计时需关注驱动的功率、响应速度、控制精度等,以保证机器人可以准确执行任务。
1.3传感系统设计
传感器是机器人的“感官”,用于获取外部环境信息。传感器的设计应考虑灵敏度、反应时间、可靠性等因素,并合理布局以覆盖所有必要的检测范围。
1.4控制系统设计
控制系统相当于机器人的“大脑”,涉及中央处理单元、程序控制算法等。它负责处理传感器收集到的数据,并发出精确的指令来控制机器人的动作。
2.1材料选择不当
选择不当的材料会导致结构强度不足、耐久性差或过于笨重。解决这一问题的关键在于充分了解材料特性,并根据机器人工作环境和任务需求进行合理选择。
2.2驱动系统匹配问题
驱动系统的选择和匹配对机器人的性能至关重要。不匹配的驱动系统会导致机器人动作不协调、反应迟缓。通过精确计算负载需求和动力学分析可以有效解决这一问题。
2.3控制精度不足
控制精度不足可能源于算法错误、传感器误差或机械本体的不稳定。提升控制精度需要综合考虑所有系统,通过优化算法、升级传感器以及改善机械结构设计来共同提升。
2.4机器人协调性问题
机器人的协调性问题通常表现在多个执行机构不协调运动或对复杂指令反应不灵敏。通过强化控制系统与各个部分的协同工作能力,以及进行充分的模拟和测试,可以有效提升协调性。
2.5安全与维护性考虑不足
在设计阶段,若未充分考虑到机器人在操作中的安全性以及维护的便捷性,将导致使用过程中出现安全风险或维护成本增加。设计时应遵循相关安全标准,并考虑模块化设计以便于维护。
综上所述,机器人结构设计是一项系统工程,涵盖多个方面。从机械本体到驱动系统,再到传感与控制系统,每一部分都紧密相连、缺一不可。面对设计中遇到的问题,需要综合考虑、细致分析,才能确保设计出既高效又稳定的机器人。希望本文对您在机器人结构设计方面有所启发和帮助。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 3561739510@qq.com 举报,一经查实,本站将立刻删除。


